
บทที่4คู่มือทางเทคนิคการสั่นสะเทือน
1. คำศัพท์เกี่ยวกับการสั่นสะเทือน
-
การสั่นสะเทือนหมายถึงสถานะของวัตถุที่เคลื่อนที่ไปข้างหลัง/ไปข้างหน้า ขวา/ซ้าย หรือขึ้น/ลงซ้ำๆ และแสดงโดยทั่วไปด้วยความถี่ การกระจัด ความเร็ว และความเร่ง
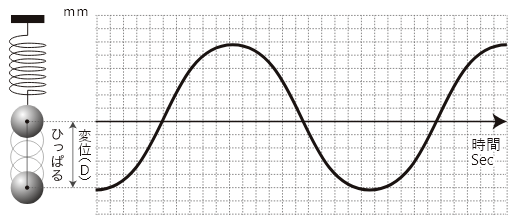
องค์ประกอบทั้ง 4 เหล่านี้โดยทั่วไปจะแสดงเป็น F, D, V, A สิ่งนี้แสดงให้เห็นง่ายๆว่าเป็นสปริงและมวล When the mass is pulled down from the start position and released, the mass moves just like the vibration waveform shown in the graph on the right. -
หลักการสั่นสะเทือน
-
ความถี่ (ฉ)
ความถี่ หมายถึง จำนวนครั้งที่วัตถุที่สั่นสะเทือนสร้างการเคลื่อนที่ซ้ำๆ ใน 1 วินาที
หน่วย:เฮิรตซ์ -
การกระจัด (D)
การกระจัดหมายถึงแอมพลิจูด (ระยะทาง) ระหว่างจุดสูงสุดของการสั่นสะเทือน
หน่วย:μm, mm -
ความเร็ว (วี)
ความเร็ว หมายถึง อัตราการเปลี่ยนแปลงของการกระจัด (D) ต่อเวลา
หน่วย: มม./วินาที ซม./วินาที -
ความเร่ง (A)
ความเร่ง หมายถึง อัตราการเปลี่ยนแปลงของความเร็ว (V) ต่อเวลา
หน่วย:m/s2,g -
H-ฟังก์ชั่น
ฟังก์ชั่นที่มีประสิทธิภาพในการตรวจจับเสียงที่ผิดปกติของตลับลูกปืน 2kHz~15kHz การกรองไปยังรูปคลื่นความเร่งสามารถขจัดสัญญาณรบกวนสำหรับการวิเคราะห์รูปคลื่นได้
เกี่ยวกับฟังก์ชัน H
2. ฟังก์ชั่นการวัด
สิ่งเหล่านี้เป็นวิธีการแสดงการสั่นสะเทือนในค่าสัมบูรณ์โดยอ้างอิงจากรูปคลื่นที่วัดโดยโหมดที่แสดงด้านบน
-
1. จุดสูงสุด
ค่าสูงสุดในช่วงเวลาหนึ่ง
ใช้วัดแรงกระแทกหรือคลื่นที่ค่อนข้างคงที่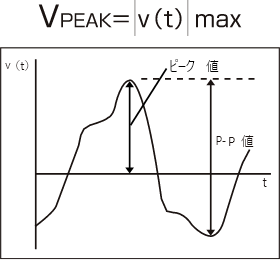
รูป:ค่าสูงสุด
-
2. rms (ค่ากำลังสองของค่าเฉลี่ยราก)
รูทค่าเฉลี่ยกำลังสองของค่าทันทีในช่วงเวลาหนึ่ง มันเกี่ยวข้องกับพลังของคลื่น ค่า rms ของความเร็วเป็นหนึ่งในปัจจัยสำคัญสำหรับการวินิจฉัยสถานะเครื่องจักร
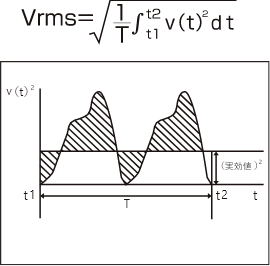
มะเดื่อ: รากหมายถึงค่ากำลังสอง
-
3. C・F(พีคแฟคเตอร์・เครสต์แฟกเตอร์)
อัตราส่วนพีคต่อ RMS
ใช้เพื่อระบุการเสื่อมสภาพของตลับลูกปืนโดยการเปรียบเทียบแบบสัมพัทธ์
C・F=พีค/rms -
4. EQP (ค่าสูงสุดเทียบเท่า)
เป็นค่าพีคไซน์ที่สมมติโดยค่า rms
สำหรับคลื่น คลื่นแบบไซน์ ความสัมพันธ์ rms×√2=PEAK นั้นถูกต้อง
สำหรับระบบตรวจสอบการสั่นสะเทือน มีบางกรณีที่มีการตรวจสอบ EPQ แทนค่าสูงสุดที่หลีกเลี่ยงการกระตุ้นสัญญาณเตือนที่ผิดพลาดด้วยสัญญาณที่ไม่ได้ตั้งใจ
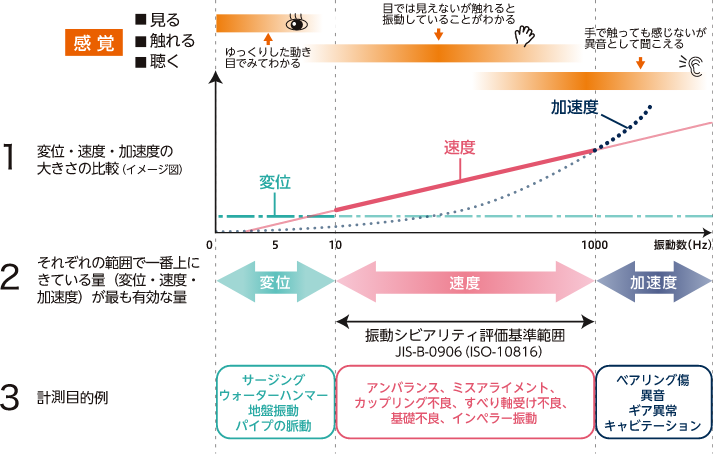
3. ประเภทของการสั่นสะเทือน
การสั่นสะเทือนสามารถแบ่งออกเป็นสามประเภทตามการรับรู้ของมนุษย์ “เคลื่อนไหวช้าและมองเห็นได้” “มองไม่เห็นแต่สัมผัสได้ด้วยการสัมผัส” และ “สัมผัสไม่ได้เมื่อสัมผัส แต่ได้ยินเสียงดังผิดปกติ”
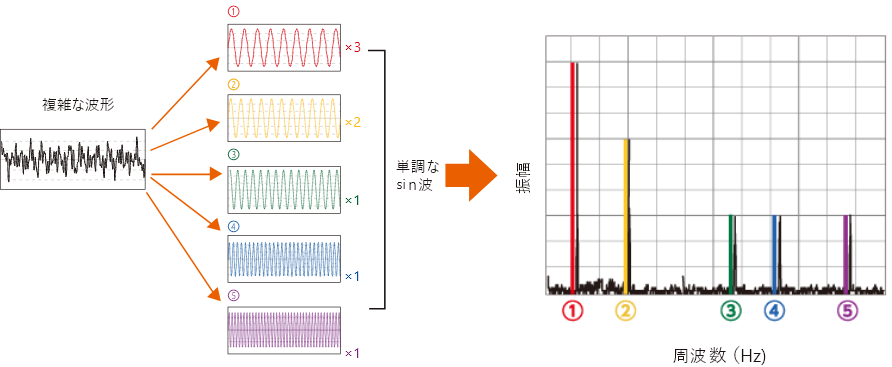
4. FFT (Fast Fourier Transform) คืออะไร?
FFT เป็นวิธีการวิเคราะห์วิธีหนึ่ง โดยพิจารณาจากรูปคลื่นการสั่นสะเทือน โดยทั่วไป รูปคลื่นมีความซับซ้อนและยากต่อการวิเคราะห์
ใน FFT เราแบ่งรูปคลื่นออกเป็นชุดของคลื่นบาปที่ไม่ต่อเนื่อง (แผนภูมิด้านซ้าย) และประเมินทีละรายการ (แผนภูมิด้านขวา)
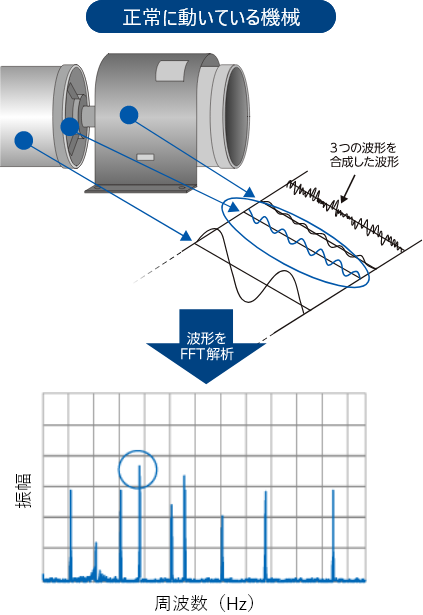
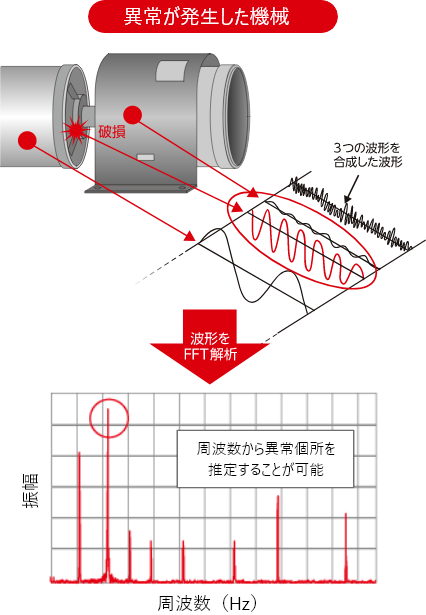
5. การใช้การวิเคราะห์สเปกตรัม FFT สำหรับการวิเคราะห์การสั่นสะเทือน
เมื่อเครื่องจักรทำงานผิดปกติ เช่น เนื่องจากความไม่สมดุลหรือความเสียหายของตลับลูกปืน จะทำให้เกิดการสั่นสะเทือนแบบต่างๆ ที่สามารถตรวจจับได้โดยใช้ FFT
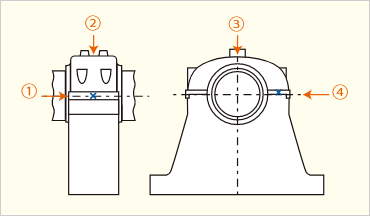
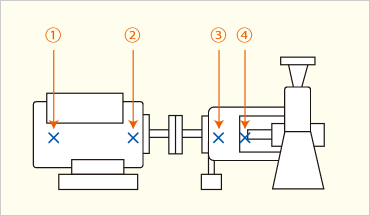
6. การเลือกจุดวัด
บางประเด็นที่ต้องพิจารณาเมื่อเลือกตำแหน่งของสถานะการตรวจสอบ
-
1.ความสะดวกในการเข้าถึง
-
2.ผลกระทบขั้นต่ำจากสภาพภายนอก
-
3.ความไวสูงสุดต่อสภาวะผิดปกติ
-
4.การลดทอนสัญญาณขั้นต่ำหรือการสูญเสียสัญญาณที่เกิดจากความผิดปกติ
-
5.ความน่าเชื่อถือของการวัด
-
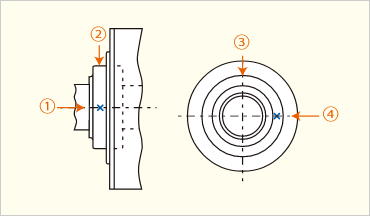
จุดวัดฐานตลับลูกปืน
-
จุดวัดของตลับลูกปืนในตัว
-
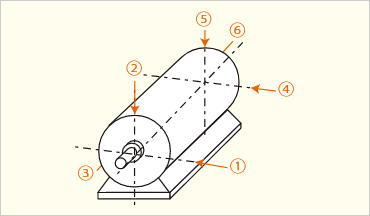
จุดวัดอุปกรณ์ไฟฟ้าขนาดเล็ก
-
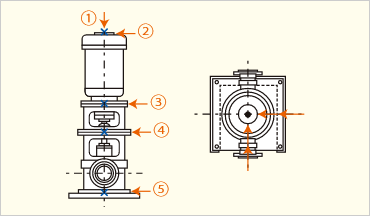
จุดวัดของเครื่องยนต์ลูกสูบ
-
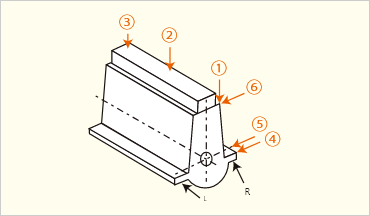
จุดวัดของเครื่องแนวตั้ง
-
จุดวัดของปั๊มแบบเท้าแขน
ข้อมูลอ้างอิง:การวินิจฉัยการตรวจสอบสภาพเครื่อง ISO (หมวดการสั่นสะเทือนII)
ที่ออกโดยสมาคมวิจัยการสั่นสะเทือน (Shindo Gijyutu Kenkyukai)
7. วิธีการแก้ไขรถกระบะ
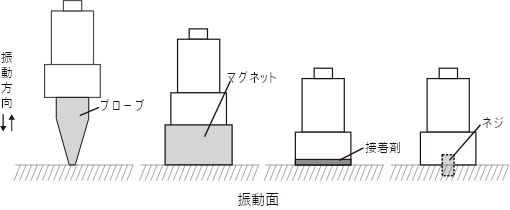
การติดปิ๊กอัพอย่างไม่ถูกต้องอาจทำให้ข้อมูลกระจัดกระจายหรือการวัดที่ไม่ถูกต้อง
โปรดทราบประเด็นต่อไปนี้
-
1. วางหรือติดให้แน่น
-
2. ยึดเกาะพื้นผิวทั้งหมดให้แนบสนิท
-
3. จัดแนวแกนของวัตถุในแนวตั้งหรือแนวนอน
-
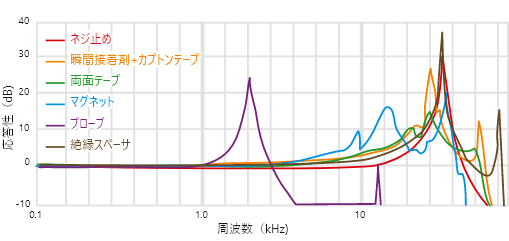
โปรดทราบว่าการติดตั้งเซ็นเซอร์วัดแรงสั่นสะเทือนอาจแตกต่างกันไปตามช่วงความถี่ในการวัด ปิ๊กอัพหรือมาตรความเร่งที่ติดผิดอาจทำให้การวัดไม่เสถียรและข้อมูลที่ไม่ถูกต้อง
一โดยทั่วไป การวัดคือ 1/3 ของความถี่เรโซแนนซ์
การติดปิ๊กอัพและคอนแทกเรโซแนนซ์
8. วิธีการวัด
มีอยู่ 2 ข้อด้วยกันคือมาที่นี่เพื่อวัด “ระบบตรวจสอบการสั่นสะเทือนแบบออนไลน์ถาวร” และ “ระบบตรวจสอบแบบออฟไลน์แบบพกพา” โดยทั่วไปจะเลือกอย่างใดอย่างหนึ่งโดยขึ้นอยู่กับลำดับความสำคัญของอุปกรณ์
ระบบตรวจสอบการสั่นสะเทือนออนไลน์แบบถาวร
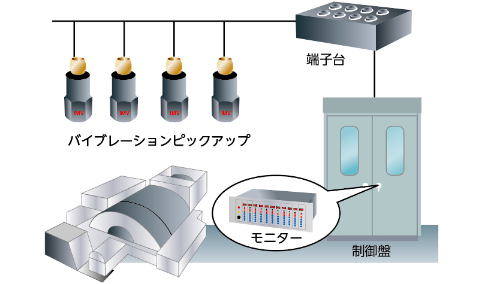
- เครื่องจักรที่สำคัญ
- เครื่องจักรที่ทำงานสม่ำเสมอ
- เครื่องจักรที่คนเข้าไม่ถึง
- เครื่องจักรที่มีอัตราการเสื่อมสภาพสูง
ระบบตรวจสอบออฟไลน์แบบพกพา
- เครื่องจักรที่ได้รับผลกระทบจากการพังทลายน้อยกว่า
- เครื่องจักรที่มีการวัดการสั่นสะเทือนอย่างง่าย
- เครื่องจักรที่มีอัตราการย่อยสลายช้า