
Chương4Hướng dẫn kỹ thuật rung
1. Thuật ngữ rung động
-
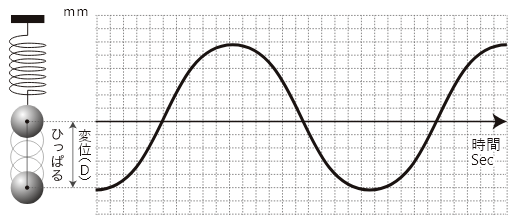
Rung động có nghĩa là trạng thái của một vật thể di chuyển lặp đi lặp lại tới/lui, phải/trái hoặc lên/xuống và thường được biểu thị bằng Tần số, Độ dịch chuyển, Vận tốc và Gia tốc.
4 yếu tố này thường được ký hiệu là F, D, V, A. Điều này được minh họa đơn giản như lò xo và khối lượng. Khi vật nặng được kéo xuống khỏi vị trí ban đầu và được thả ra, vật nặng sẽ chuyển động giống như dạng sóng dao động thể hiện trong biểu đồ bên phải. -
Nguyên lý rung động
-
tần số(F)
Tần số nghĩa là số lần vật dao động tạo ra chuyển động lặp đi lặp lại trong 1 giây.
Đơn vị: Hz -
Dịch chuyển (D)
Độ dịch chuyển có nghĩa là biên độ (khoảng cách) giữa các đỉnh rung động.
Đơn vị:μm,mm -
vận tốc(V)
Vận tốc có nghĩa là tốc độ dịch chuyển thay đổi (D) theo thời gian
Đơn vị:mm/s, cm/s -
Tăng tốc(A)
Gia tốc có nghĩa là tốc độ thay đổi của vận tốc (V) theo thời gian
Đơn vị:m/s2,g -
chức năng H
Chức năng hiệu quả để phát hiện tiếng ồn ổ trục bất thường. Bộ lọc 2kHz~15kHz thành dạng sóng gia tốc có thể loại bỏ nhiễu để phân tích dạng sóng.
Giới thiệu về chức năng H
2. chức năng đo lường
Đây là những phương tiện để biểu thị rung động ở giá trị tuyệt đối dựa trên các dạng sóng được đo bằng các chế độ nêu trên.
-
1. ĐỈNH CAO
Giá trị cao nhất trong một khoảng thời gian nhất định.
Nó được sử dụng để đo các cú sốc hoặc sóng khá ổn định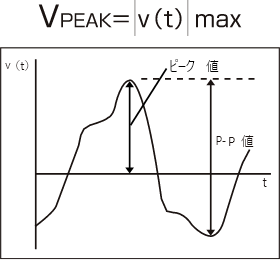
Hình: Giá trị đỉnh
-
2. rms(Giá trị bình phương trung bình gốc)
Giá trị bình phương trung bình gốc của các giá trị tức thời trong một khoảng thời gian nhất định. Nó liên quan đến sức mạnh của làn sóng.Giá trị rms của vận tốc là một trong những yếu tố quan trọng để chẩn đoán tình trạng máy móc.
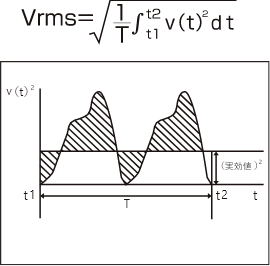
Hình: Giá trị bình phương trung bình gốc
-
3. C・F(Hệ số đỉnh・Hệ số đỉnh)
Tỷ lệ PEAK trên RMS
Nó được sử dụng để xác định sự xuống cấp của vòng bi bằng cách so sánh tương đối.
C・F=ĐỈNH/rms -
4. EQP (Giá trị đỉnh tương đương)
Đó là một đỉnh hình sin được giả định bởi giá trị rms.
Đối với sóng Sin, mối quan hệ rms×√2=PEAK là hợp lệ.
Đối với hệ thống giám sát rung động, có trường hợp EPQ được giám sát thay vì giá trị cực đại để tránh kích hoạt báo động sai bởi bất kỳ tín hiệu tình cờ nào.
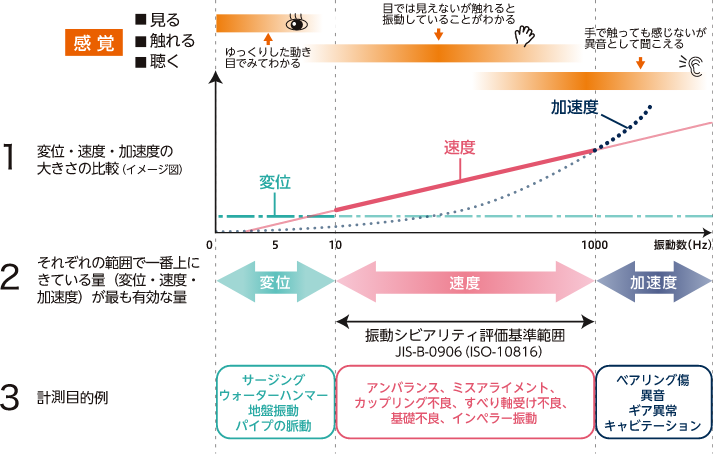
3. Các loại rung động
Rung động có thể được chia thành ba loại dựa trên nhận thức của con người; “chuyển động chậm và có thể nhìn thấy” “không nhìn thấy nhưng có thể cảm nhận được bằng cách chạm vào” và “không thể nhìn thấy bằng cách chạm vào, nhưng có thể nghe thấy dưới dạng tiếng ồn bất thường”.
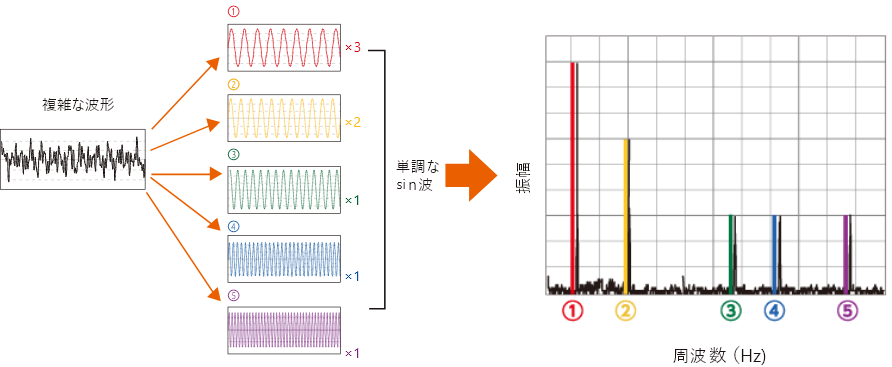
4. FFT (Biến đổi Fourier nhanh) là gì?
FFT là một phương pháp phân tích, dựa trên dạng sóng rung động.Nói chung, các dạng sóng rất phức tạp và khó phân tích.
Trong FFT, chúng tôi chia các dạng sóng thành một loạt các sóng hình sin rời rạc, (biểu đồ bên trái) và đánh giá từng dạng riêng lẻ.(biểu đồ bên phải)
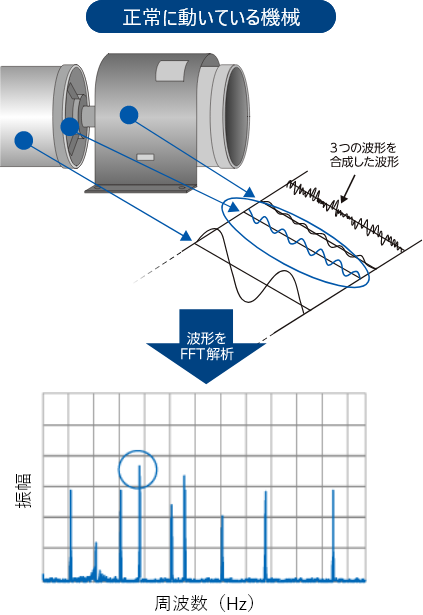
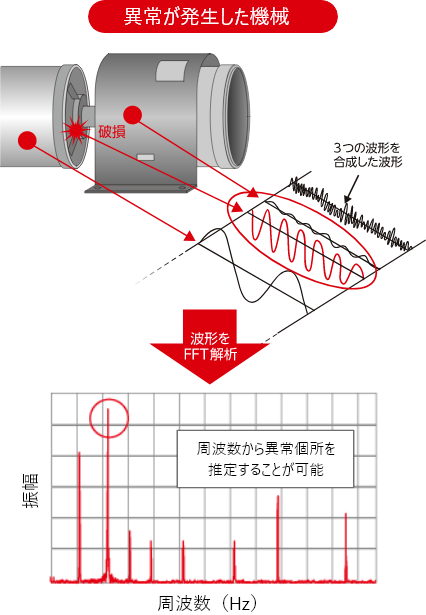
5. Sử dụng phân tích phổ FFT để phân tích rung động
Khi máy hoạt động bất thường, ví dụ như do mất cân bằng hoặc hư hỏng ổ trục, máy sẽ tạo ra các rung động khác nhau có thể được phát hiện bằng FFT.
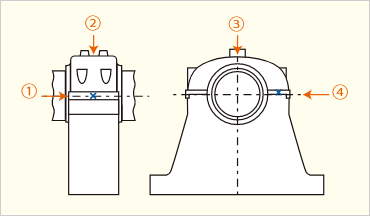
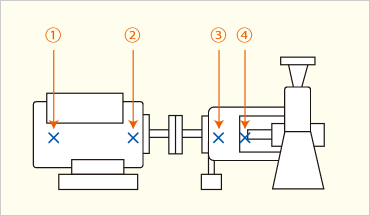
6. Lựa chọn điểm đo
Một số điểm cần lưu ý khi lựa chọn vị trí quan trắc hiện trạng.
-
1.Dễ dàng tiếp cận
-
2.Tác động tối thiểu từ điều kiện bên ngoài
-
3.Độ nhạy tối đa với các điều kiện bất thường
-
4.Suy giảm tín hiệu tối thiểu hoặc mất tín hiệu do bất thường
-
5.Độ tin cậy của phép đo
-
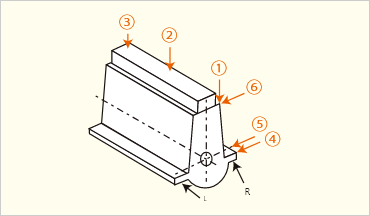
Điểm đo của giá đỡ
-
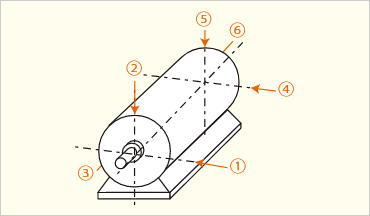
Điểm đo của ổ trục tích hợp
-
Điểm đo của thiết bị điện nhỏ
-
Điểm đo của động cơ pittông
-
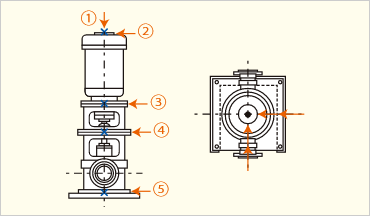
Điểm đo của máy dọc
-
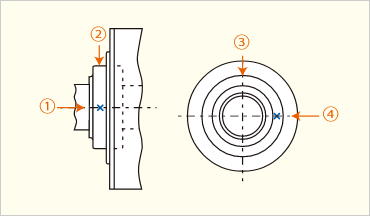
Điểm đo của bơm loại công xôn
Tham khảo:Chẩn đoán theo dõi tình trạng máy theo tiêu chuẩn ISO (loại rung động II) do Hiệp hội Nghiên cứu Rung động (Shindo Gijyutu Kenkyukai) ban hành
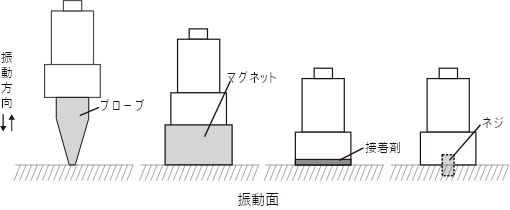
7. Phương pháp sửa xe bán tải
Việc gắn các bộ thu không chính xác có thể khiến dữ liệu bị phân tán hoặc phép đo không chính xác.
Xin lưu ý những điểm sau đây.
-
1. Đặt hoặc đính kèm chắc chắn
-
2. Làm cho tất cả các bề mặt gắn kết chặt chẽ
-
3. Căn chỉnh theo chiều dọc hoặc chiều ngang với trục của đối tượng
-
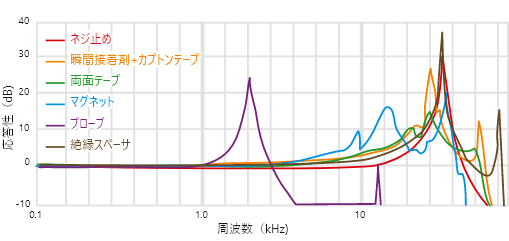
Xin lưu ý rằng việc lắp đặt cảm biến rung có thể khác nhau tùy theo dải tần số đo. Các cảm biến hoặc cảm biến gia tốc được gắn sai có thể gây ra kết quả đo không ổn định và dữ liệu không chính xác.
一Nói chung, phép đo là 1/3 tần số cộng hưởng.
Đính kèm xe bán tải và cộng hưởng tiếp xúc
8. Phương pháp đo lường
TCó hai Loại rung động Phương pháp đo lường “Hệ thống giám sát rung động trực tuyến vĩnh viễn” và “Hệ thống giám sát ngoại tuyến di động”. Một trong hai được chọn thường tùy thuộc vào cấp độ quan trọng của thiết bị.
Hệ thống giám sát rung động trực tuyến vĩnh viễn
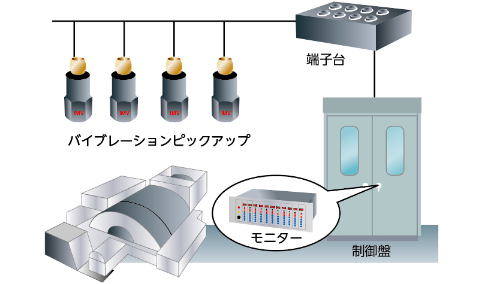
- máy móc quan trọng
- Máy móc hoạt động liên tục
- Máy móc không thể tiếp cận với mọi người
- Máy có tốc độ xuống cấp cao
Hệ thống giám sát ngoại tuyến di động
- Máy móc ít bị ảnh hưởng bởi sự cố
- Máy đo độ rung dễ dàng
- Máy có tốc độ xuống cấp chậm