
บทที่5การประเมินค่าการสั่นสะเทือน
1. การประเมินความสำคัญของสิ่งอำนวยความสะดวก
-
เครื่องจักรมูลค่าสูง(เครื่องกำเนิดไฟฟ้าส่วนตัว, เครื่องอัดแรงดันสูง ฯลฯ)
ความล้มเหลวทางกลไกเชื่อมโยงโดยตรงกับการหยุดทำงาน
-
เครื่องจักรที่สำคัญ(บอยเลอร์, ปั๊ม, คอมเพรสเซอร์ ฯลฯ)
ความล้มเหลวทางกลอาจทำให้การผลิตลดลง
-
เครื่องจักรธรรมดา(ไอดีหรือพัดลมดูดอากาศ ฯลฯ)
ความล้มเหลวทางกลไกอาจทำให้ไม่สะดวกในการใช้งาน
-
เครื่องจักรมูลค่าต่ำ(มอเตอร์เอนกประสงค์ขนาดเล็ก ฯลฯ)
ความล้มเหลวทางกลไกไม่ได้เชื่อมโยงกับการทำงาน และการซ่อมแซม/เปลี่ยนอะไหล่นั้นถูกกว่ามาก
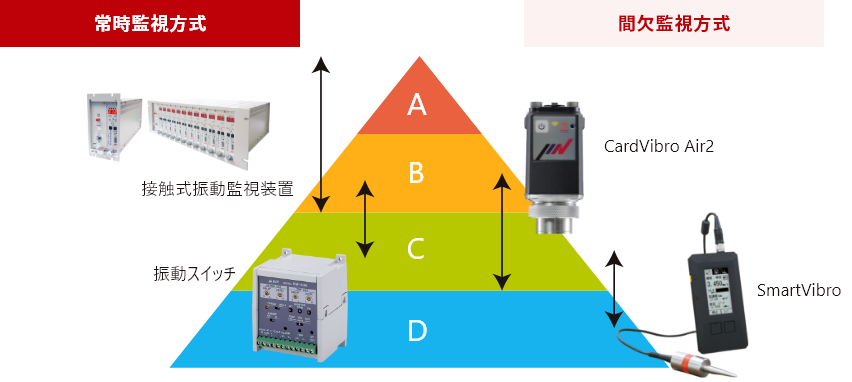
ระบบตรวจสอบถาวร
-
ระบบ การตรวจติดตาม เซนเซอร์สัมผัส ชนิดสั่นสะเทือน (VM-9301)
คลิกที่นี่สำหรับหน้าผลิตภัณฑ์
-
สวิตช์สั่นสะเทือน (VM-90A)
คลิกที่นี่สำหรับหน้าผลิตภัณฑ์
ระบบตรวจสอบออฟไลน์
-
การ์ดไวโบร แอร์2(VM-2012/VM-2012C)
คลิกที่นี่สำหรับหน้าผลิตภัณฑ์
-
SmartVibro(VM-4424H/VM-3024H/ VM-7034H)
คลิกที่นี่สำหรับหน้าผลิตภัณฑ์
2. การวินิจฉัยอย่างง่ายคืออะไร?
จุดมุ่งหมายคือเพื่อวินิจฉัยสิ่งอำนวยความสะดวกและแสดงระดับการเสื่อมสภาพอย่างชัดเจนโดยการวัดการสั่นสะเทือน ค่าการตัดสินเป็นสิ่งจำเป็นสำหรับการประเมินที่แม่นยำ มีสามวิธีการตัดสินหลักในการวินิจฉัยอย่างง่าย การใช้ทั้งสามวิธีจะช่วยให้การวัดแม่นยำยิ่งขึ้น
1.การตัดสินค่าสัมบูรณ์
สิ่งอำนวยความสะดวกแบ่งออกเป็นหลายประเภท (ประเภทเล็ก ประเภทกลาง ประเภทใหญ่) เป็นวิธีการที่หากการสั่นสะเทือนที่วัดได้เกินระดับที่กำหนด จะได้รับการวินิจฉัยว่าเป็นความผิดปกติ
ข้อได้เปรียบ
การตัดสินเป็นเรื่องง่ายเพราะมีมาตรฐานการวินิจฉัยอยู่แล้ว
ข้อเสีย
การตัดสินอาจเปลี่ยนแปลงได้ขึ้นอยู่กับประเภทหรือส่วนประกอบของสิ่งอำนวยความสะดวกและผู้ผลิต
ตัวอย่างคำพิพากษา
มาตรฐานการประเมินการสั่นสะเทือน ISO
มาตรฐานนี้ใช้กันอย่างแพร่หลายสำหรับการตัดสินแบบสังเคราะห์ของเครื่องจักรแบบหมุน
มาตรฐาน ISO 10816-3:2009 ฉบับปัจจุบันอธิบายถึงการตัดสินค่าสัมบูรณ์ด้วย rms ความเร็ว
-
วัตถุประสงค์เครื่องจักรแบ่งออกเป็น 2 กลุ่มใหญ่
-
กลุ่มเครื่องจักร1เครื่องจักรขนาดใหญ่
กำลังขับ: 300kW~50MW, ความสูงของเพลา:> 315 มม
-
กลุ่มเครื่องจักร2เครื่องจักรขนาดกลาง
เอาต์พุต: 15kW~300kW, ความสูงของเพลา: 160mm~315mm
-
-
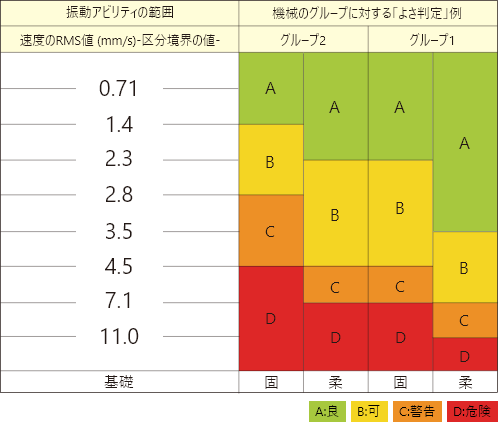
รูป: ข้อกำหนดสำหรับเครื่องมือวัดความรุนแรงของการสั่นสะเทือน 10816:2009
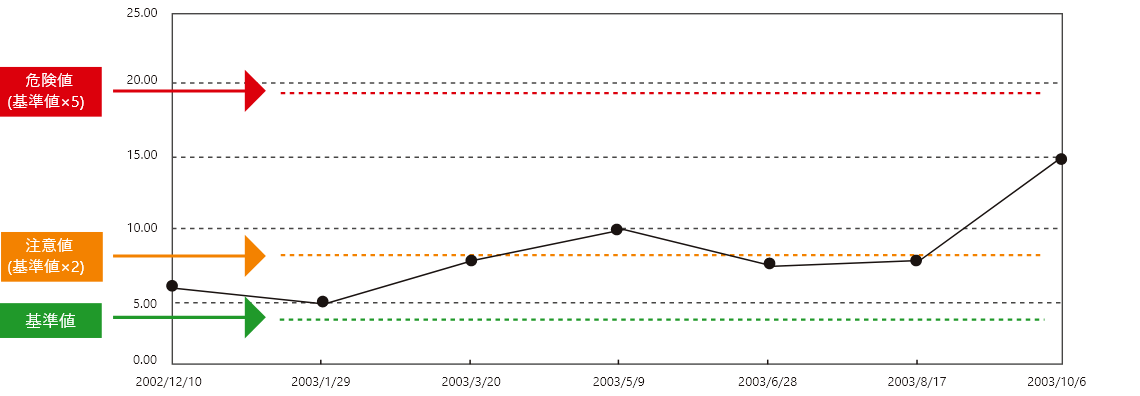
2. การตัดสินคุณค่าสัมพัทธ์
วิธีการตั้งค่า RMS ความเร็วมาตรฐานและเปรียบเทียบค่าปกติกับค่าสัมบูรณ์บางค่าเพื่อการตัดสิน ค่าปกติของความเร็ว RMS ซึ่งเดิมตั้งขึ้นโดยใครบางคนจะถูกคูณด้วย x ครั้งเพื่อถือเป็น “ค่าแจ้งเตือน” หรือ “ค่าอันตราย” ตัวอย่างเช่น เมื่อค่าความเร็ว RMS ของมอเตอร์แสดง 5.00 เกือบทุกครั้งหลังจากการวัดมากกว่า 10 ครั้ง สามารถตั้งค่า “5.00” เป็นค่าปกติได้ 10.00 (สูงกว่าค่าปกติ 2 เท่า) ตั้งเป็นค่าแจ้งเตือน 25.00 (สูงกว่าค่าปกติ 5 เท่า) เป็นค่าอันตราย ควรตัดสินใจค่าปกติหลังจากการวัดมากกว่า 10 ครั้ง
ข้อได้เปรียบ
แม่นยำกว่าการตัดสินด้วยค่าสัมบูรณ์
ข้อเสีย
เนื่องจากค่าปกติจะถูกตัดสินตามประสบการณ์ส่วนบุคคล ดังนั้นความกำกวมจึงยังคงอยู่ในความถูกต้องของค่าการตัดสิน
ตัวอย่างคำพิพากษา
กรณีนี้ตั้งค่าการแจ้งเตือนให้สูงกว่าค่าปกติถึง 2 เท่า ค่าอันตรายถูกกำหนดให้สูงเป็นห้าเท่าของค่าปกติ
กราฟการวิเคราะห์แนวโน้ม V(RMS)
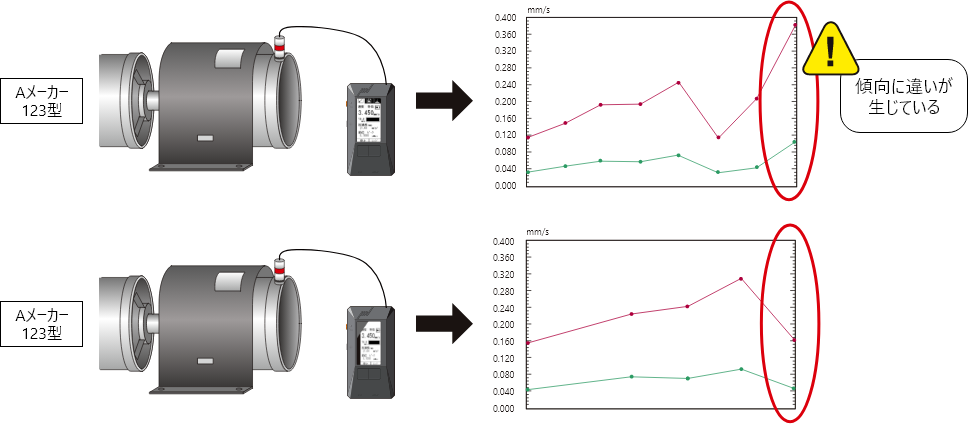
3. การตัดสินมูลค่าระหว่างการเปรียบเทียบ
วิธีการตัดสินโดยการเปรียบเทียบปริมาณการสั่นสะเทือน ณ จุดวัดเดียวกันของเครื่องจักรเดียวกัน หากค่าตัวเลขมากกว่าสองเท่าของสิ่งอำนวยความสะดวกเทียบเท่า มีความเป็นไปได้ที่จะเกิดความผิดปกติ
ข้อได้เปรียบ
แม่นยำกว่าการตัดสินด้วยค่าสัมพัทธ์
ข้อเสีย
เครื่องจักรที่ใช้ได้มีจำนวนจำกัด
ตัวอย่างคำพิพากษา
เมื่อมีความแตกต่างมากกว่าสองเท่าระหว่างเครื่องจักรเดียวกันทั้งสอง อาจมีความผิดปกติ
3. การวินิจฉัยที่แม่นยำคืออะไร?
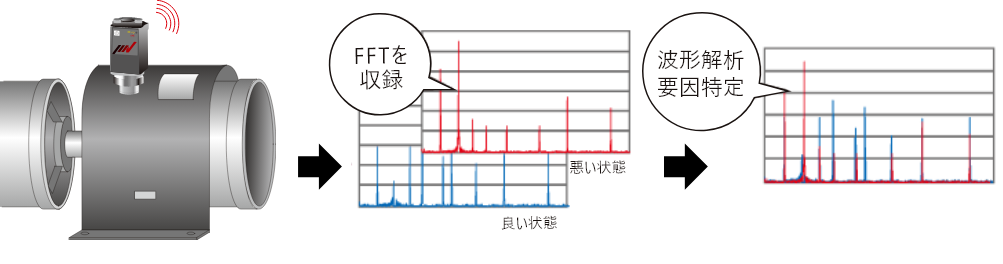
จุดมุ่งหมายคือการวิเคราะห์รูปคลื่นด้วย FFT และระบุชิ้นส่วนเครื่องจักรที่เสื่อมสภาพด้วยการกระจายความถี่ ทำให้ได้ผลลัพธ์ที่เชื่อถือได้มากกว่าการวินิจฉัยง่ายๆ
เมื่อเปรียบเทียบเครื่องจักรปกติและเครื่องจักรที่ผิดปกติกับ FFT อาจแสดงการเปลี่ยนแปลงครั้งใหญ่ที่ค่าความถี่คุณลักษณะ แผนภูมิต่อไปนี้เกี่ยวกับความถี่ของฟีเจอร์และประเภทของสถานะผิดปกติ
ความผิดปกติของตลับลูกปืนและความถี่ของคุณลักษณะ
| ประเภทของสถานะผิดปกติ | โหมดที่จะตรวจสอบ | ความถี่ คุณสมบัติ | ||
|---|---|---|---|---|
| 1 | ความไม่สมดุล | ความเร็ว | 1 × N/60 และความถี่ (เล็กน้อย) | |
| 2 | ความไม่ตรงแนว | ความเร็ว | M × N/60 | |
| 3 | ลูกปืนขูดขีด | ความเสียหายของวงแหวนรอบนอก | ความเร่ง | 0.4 × (จำนวนลูก) × N/60 และฮาร์มอนิกของมัน |
| ความเสียหายของวงแหวนด้านใน | ความเร่ง | 0.6 × (จำนวนลูก)) × N/60 และฮาร์มอนิกของมัน | ||
| ความเสียหายขององค์ประกอบกลิ้ง | ความเร่ง | 2.5 × N/60 และฮาร์มอนิกของมัน | ||
| ความเสียหายของกรง | ความเร่ง | 0.4 × N/60 และฮาร์มอนิกของมัน | ||
| จาระบีหรือน้ำมันขาด | ความเร่ง | N/60 และฮาร์มอนิกของมัน | ||
| ความก้าวหน้าของความเสื่อมโทรม | ความเร่ง | 0.4 × (จำนวนลูก) × N/60 และฮาร์มอนิกของมัน or、 0.6 × (จำนวนลูก)) × N/60 และฮาร์มอนิกของมัน or、 0.4 × N/60 และฮาร์มอนิกของมัน or、 2.5 × N/60 และฮาร์มอนิกของมัน |
||
| 4 | เกียร์ | จาระบีหรือน้ำมันขาด | ความเร็ว/ซองจดหมาย | PHz (ความถี่ในการทอย) |
| ทอย(ความบกพร่องของผิวฟัน) | ความเร็ว/ซองจดหมาย | P | ||
| ฟันบิ่น (สึกบางส่วน) | ความเร็ว/ซองจดหมาย | P±MN | ||
| ฟันบิ่น | ความเร็ว/ซองจดหมาย | MN | ||
| ความเยื้องศูนย์กลาง | ความเร็ว/ซองจดหมาย | MN or P±MN P=Z × N/60 | ||
| 5 | ความเร็วเพลาดัด | ความเร็ว | 1 × N/60 และฮาร์มอนิกของมัน | |
| 6 | แคร็กเพลา ความเร็ว | ความเร็ว | 1 × N/60 และฮาร์มอนิกของมัน | |
| 7 | เสียงสะท้อน | ความเร็ว/ความเร่ง/ซองจดหมาย | การสั่นสะเทือนของความถี่ธรรมชาติ | |
| 8 | สัญญาณไฟฟ้า | ความเร็ว | 50 or 60Hz | |
| 9 | การถู | ซองจดหมาย | การสั่นสะเทือนความถี่สูง (>1 kHz) | |
| 10 | การสั่นสะเทือนภายนอก | ความเร็ว/ความเร่ง/ซองจดหมาย | ขึ้นอยู่กับสิ่งอำนวยความสะดวกอื่นๆ | |
N=จำนวนการหมุนเวียน (รอบต่อนาที), M=หลายรายการ (1, 2, 3…), P=ความถี่ในการทอย *สามารถรับรู้ความผิดปกติที่อธิบายข้างต้นได้อย่างถูกต้องโดยการตรวจสอบโหมดที่ระบุ