
Mô phỏng kiểm tra độ rung
Vì sự an toàn và an ninh trong tương lai
Chúng tôi đang nghiên cứu ảo hóa kiểm tra độ rung,dự đoán chính xác hoạt động của EUT trong quá trình thử nghiệm rung động trong không gian kỹ thuật số, điều mà cho đến nay chỉ có thể được xác nhận bằng thử nghiệm thực tế.
Dịch vụ này cải thiện quy trình phát triển sản phẩm, bao gồm việc tạo mẫu và thử nghiệm lặp đi lặp lại, đồng thời giảm thiểu thời gian phát triển và chi phí sản phẩm của khách hàng.
Phần này giới thiệu mô phỏng kiểm tra độ rung của các bộ phận điện ô tô với sự hợp tác của Denso.
Những thách thức của thử nghiệm rung động ảo.
Thách thức là kết quả mô phỏng khác với kết quả thử nghiệm thực tế. Điều này là do chúng khác với các điều kiện thử nghiệm lý tưởng khi tính toán mô hình của sản phẩm (phân tích đáp ứng tần số) và các ứng suất xảy ra trong quá trình thử nghiệm thực tế = thực tế.
-
Lý tưởng
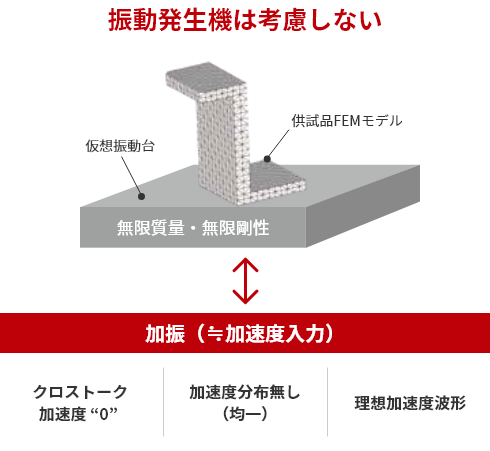
-
Thực tế
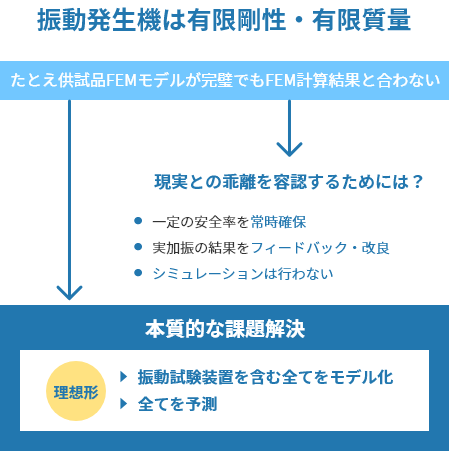
Giải pháp IMV.
Để giải quyết vấn đề, một hệ thống kiểm tra độ rung đã được lập mô hình.

1. Mô hình hệ thống kiểm tra độ rung

2. Tạo mô hình hệ thống điện và điều khiển

Làm việc với Denso
Quy trình sau đây được sử dụng để dự đoán các giá trị nhiễu xuyên âm* trên bảng rung trước khi thử nghiệm.
*Nhiễu xuyên âm đề cập đến… rung lắc bên theo hướng vuông góc với trục chính của kích thích.
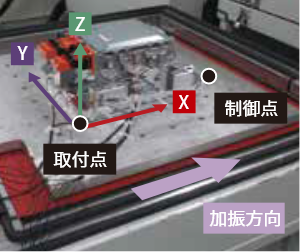
- aMô hình số của hệ thống kiểm tra độ rung, đồ gá và EUT
- bThu được đáp ứng gia tốc 3 trục của điểm gắn EUT trong mô phỏng kiểm tra độ rung bằng cách sử dụng (a).
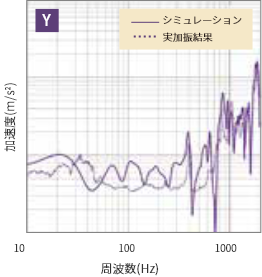
- cĐánh giá tính hợp lệ của phương pháp mô phỏng thử nghiệm rung động bằng cách so sánh kết quả rung động thực tế với (b).

cNó cung cấp thông tin về ‘tính khả dụng của kích thích’, ‘tăng tốc phản ứng’, ‘phân phối gia tốc’, ‘gia tốc ba trục’, v.v.


Kết quả và vấn đề
- Xác nhận rằng mô phỏng của toàn bộ hệ thống, bao gồm thiết bị kiểm tra độ rung, thiết bị cố định và EUT, là khả thi
- Xác nhận rằng đáp ứng gia tốc ba trục của điểm gắn EUT có thể được dự đoán với độ chính xác tương đối tốt trong dải 10-2000 Hz.
- Nghiên cứu sâu hơn và cải tiến phương pháp để cải thiện độ chính xác của mô phỏng
- Kiểm tra độ chính xác của các mô phỏng kiểm tra độ rung sử dụng mô hình EUT và làm việc để cải thiện độ chính xác
- Hợp lý hóa và tự động hóa một loạt các nhiệm vụ liên quan đến mô phỏng