

Chapter5振動の測定方法
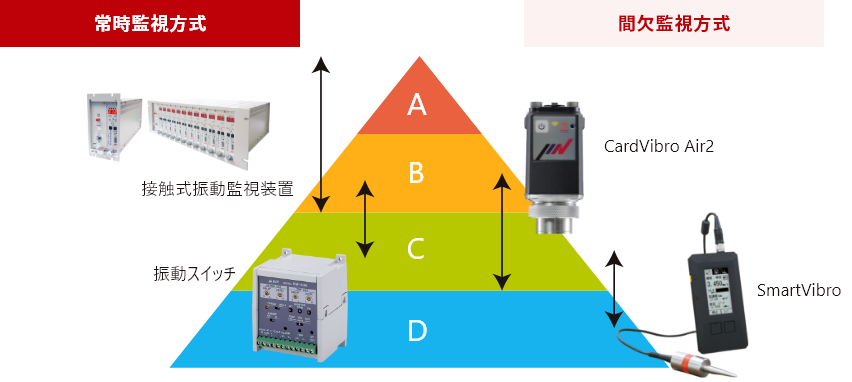
1. 設備の重要度の評価
-
最も重要な機械(自家発電装置、高圧コンプレッサーなど)
故障・不具合が生産停止などの著しい被害に直結する機械
-
重要な機械(ボイラー、ポンプ、圧縮機など)
故障・不具合が生産低下を招くが、生産停止には至らない機械
-
普通機械(吸気、換気ファンなど)
故障・不具合は運転上不便になるが、生産性に影響がない機械
-
それほど重要ではない機械(小型汎用モーターなど))
故障・不具合が生産に直結せず、修理・交換コストの方が安い機械
常時監視方式
間欠監視方式
2. 簡易診断とは?
対象設備の振動を測定し設備がどの程度劣化しているかを調べ明確にするのが目的で、設備の状態を適切に評価するには判定値の設定が必要です。簡易診断には主に3種類の判定方法があり、これらを上手に使い分けることでより精度な測定が可能になります。
1. 絶対値判定
設備の種類を幾つかに分類(小型、中型、大型)し、測定した振動があるレベルを超えた場合に異常と判断する方法
長所
診断の基準が決まっているため、判定が容易
短所
短所設備の種類や部品、メーカーで判定が異なる
判定参考例
ISO振動評価基準
回転機械におけるコンディションの総合判断に広く用いられています。
現在のISO規格では10816-3:2009
中で速度のrmsの絶対判定値の記載があります。
-
対象機械は2つの大きなグループに分かれています。
-
グループ1大型機械
出力:300kW~50MW、シャフト高さ:315mm以上
-
グループ2中型機械
出力:15kW~300kW、シャフト高さ:160mm~315mm
-
-
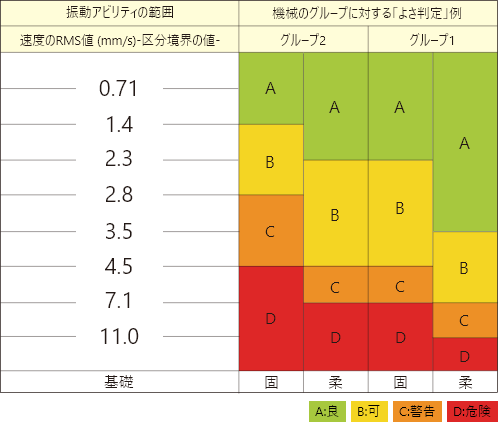
図:振動シビアリティ測定器に関する要求事項 10816:2009
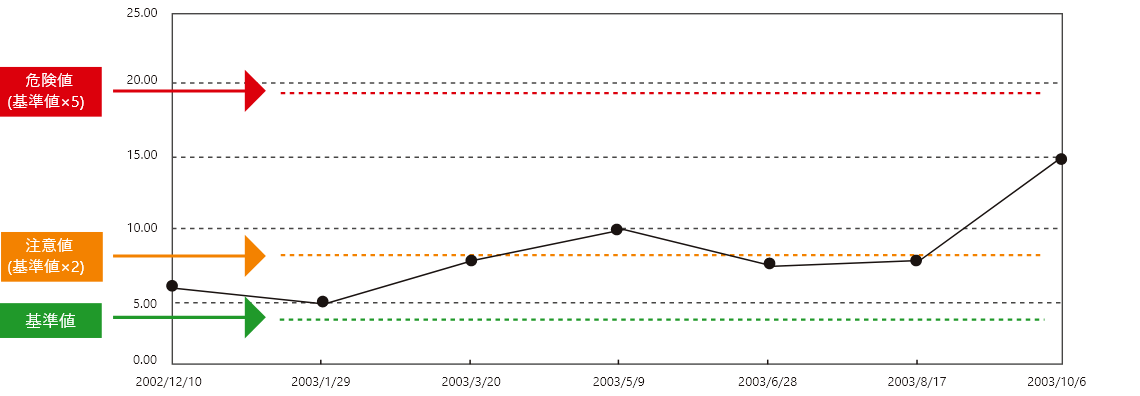
2. 相対値判定
個々の設備における数回の振動値実績をもとに基準値を算出し、これらと比較する事で、通常時と異なる事を判断する方法。基準値は10回以上測定して決定することが望ましいです。
長所
絶対値判定より精度が上がる
短所
経験値から決めた値となる為、判定値の根拠が曖昧である。
判定参考例
速度の実効値について、正常時の2倍を注意値、5倍を危険値として設定した場合。
V(RMS)傾向管理グラフ
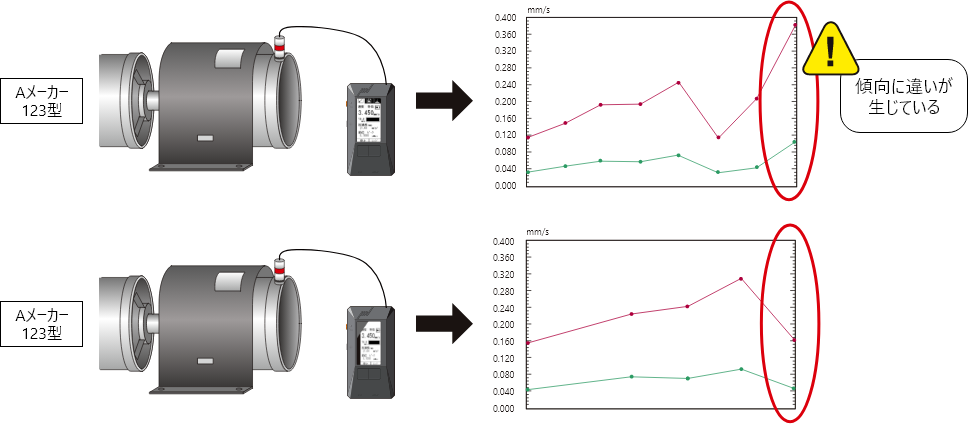
3. 相互判定
同じ機械の同一の測定点の振動値を比較して判定する方法。同等設備と比べて2倍以上数値の差があると異常の可能性が有ります。
長所
相対値判定より精度が上がる
短所
適用できる機械が限定的である
判定参考例
速度の実効値について、同等設備と比べて2倍以上数値の差があるとした場合。
3. 精密診断とは?
振動波形をFFTアナライザーで分析し、その周波数分布より劣化部位を特定することが目的です。
簡易診断より診断結果に対する信頼性は大きくなります。
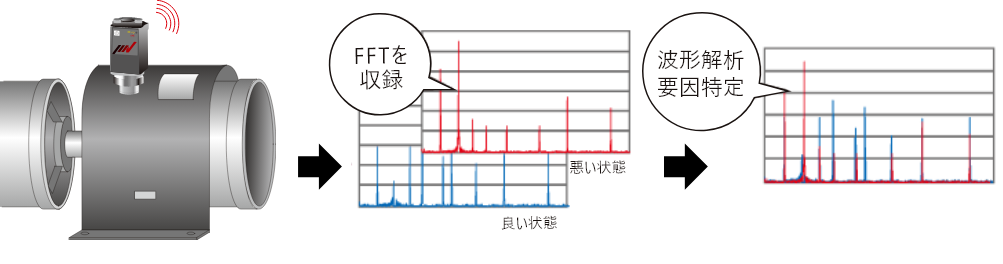
※画像はイメージです。
ベアリングの異常とその特徴周波数
| 異常の種類 | 該当モード | 特徴周波数 | ||
|---|---|---|---|---|
| 1 | アンバランス | Velocity | 1×N/60及びその周波数(わずか) | |
| 2 | ミスアライメント | Velocity | M×N/60 | |
| 3 | 転がり軸の受けの傷 | 外輪傷 | Acceleration | 0.4×(玉数)×N/60及びその高調波 |
| 内輪傷 | Acceleration | 0.6×(玉数)×N/60及びその高調波 | ||
| 転動体傷 | Acceleration | 2.5×N/60及びその高調波 | ||
| 保持器傷 | Acceleration | 0.4×N/60及びその高調波 | ||
| グリス、オイル切れ | Acceleration | N/60及びその高調波 | ||
| 劣化進み、ガタ | Acceleration | 0.4×(玉数)×N/60及びその高調波 または、 0.6×(玉数)×N/60及びその高調波 または、 0.4×N/60及びその高調波 または、 2.5×N/60及びその高調波 |
||
| 4 | ギア | グリス、オイル切れ | Velocity /Envelope | PHz(噛み合い周波数) |
| ピッチング(歯面不良) | Velocity /Envelope | P | ||
| 歯欠け(部分的摩耗) | Velocity /Envelope | P±MN | ||
| 歯欠け | Velocity /Envelope | MN | ||
| 偏心 | Velocity /Envelope | MNまたはP±MN P=Z×N/60 | ||
| 5 | 軸たわみ | Velocity | 1×N/60及びその高調波 | |
| 6 | 軸われ | Velocity | 1×N/60及びその高調波 | |
| 7 | 共振 | Velocity /Acceration /Envelope | 固有周波数で振動 | |
| 8 | 電気信号 | Velocity | 50 or 60Hz | |
| 9 | ラビング | Envelope | 約1kHz以上の高周波振動 | |
| 10 | 外部振動 | Velocity /Acceration /Envelope | 他の振動発生設備の原因による | |
N(Number of circulation)=回転数(rpm), M(Multiple)=1, 2, 3…,
P(Pitching
frequency)=噛み合い周波数
上記の異常の種類は該当するモード(Velocity/Acceleration/Envelope)で計測することで、より正確な異常を確認することができます。