cảm biến rung
Cảm biến vận tốc điện động
Nguyên tắc của cảm biến loại con lắc đối ứng là tạo ra điện áp bằng chuyển động tịnh
tiến của khối địa chấn với một cuộn dây trong từ trường được treo bằng một màng ngăn
hoặc lò xo cuộn.
 VP-3133HEX
VP-3133HEX VP-3134AEX
VP-3134AEX
 VP-3144C/D
VP-3144C/D
 VP-3144F
VP-3144F
 VP-3144W
VP-3144W
 VP-3213AC/AD
VP-3213AC/AD VP-3213AW
VP-3213AW VP-3354A
VP-3354A VP-3374C/D
VP-3374C/D
 VP-3544C/D
VP-3544C/D
-
-
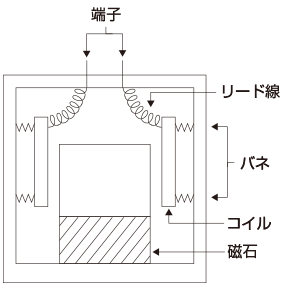
Nguyên tắc của cảm biến loại con lắc đối ứng là tạo ra điện áp bằng chuyển động tịnh tiến của khối địa chấn với một cuộn dây trong từ trường được treo bằng một màng ngăn hoặc lò xo cuộn. Do độ nhạy cao và tuyến tính tiên tiến, nó phù hợp để phát hiện sự cố hoặc hư hỏng của máy móc quay. Do cấu trúc của nó, việc lắp đặt phải được thực hiện cẩn thận theo hướng hoặc góc của nó.
Đặc trưng
Độ nhạy cao, hiệu suất ổn định, tuyến tính tiên tiến trong dải biên độ rộng
Sản lượng tương đối lớn
Do điện trở trong nhỏ nên có thể sử dụng cáp dài.
Nguồn điện bên ngoài là không cần thiết (tự phát điện)
Thích hợp để đo độ rung ổ trục tay áo
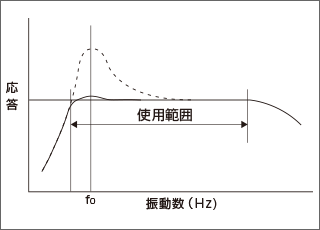
Phản hồi thường xuyên
Giới hạn tần số trên được xác định bởi đáp ứng của bộ lọc thông thấp. Giới hạn tần số thấp hơn phụ thuộc vào tần số riêng của nó. Có thể sử dụng trong dải tần số tần số thấp hơn bằng cách làm giảm đỉnh của cộng hưởng.
Phương pháp sửa chữa

sửa góc
Bảng dưới đây cho thấy góc cố định của cảm biến có tần số tự nhiên là 14 Hz hoặc 4,5 Hz.
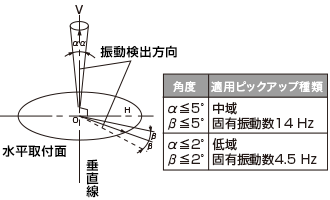
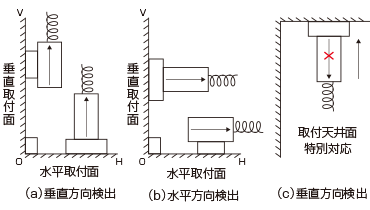
hướng cố định
Cả (a) và (b) đều khả dụng cho cảm biến có tần số tự nhiên là 14 Hz, nhưng cảm biến có tần số tự nhiên là 4,5 Hz bị giới hạn ở bất kỳ một trong các (a) hoặc (b). Không thể được cố định xuống. Vật cố định đặc biệt là cần thiết để cố định hướng lên trên.
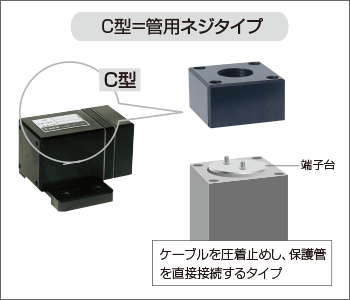
Sự khác biệt giữa C và D
Sự khác biệt giữa C và D là hình dạng của kết nối cáp.