
Chương5Đánh giá rung động
1. Đánh giá tầm quan trọng của cơ sở
-
Máy móc giá trị cao (Máy phát điện riêng, Máy nén cao áp, v.v.)
Lỗi cơ học có liên quan trực tiếp đến việc ngừng hoạt động
-
máy móc quan trọng(Nồi hơi, Máy bơm, Máy nén, v.v.)
Lỗi cơ khí có thể làm giảm sản xuất
-
Máy móc thông thường(Quạt hút hoặc quạt hút, v.v.)
Lỗi cơ học có thể gây bất tiện cho hoạt động
-
Máy móc giá trị thấp(Động cơ mục đích chung nhỏ, v.v.)
Lỗi cơ khí không liên quan đến vận hành và sửa chữa/thay thế rẻ hơn nhiều
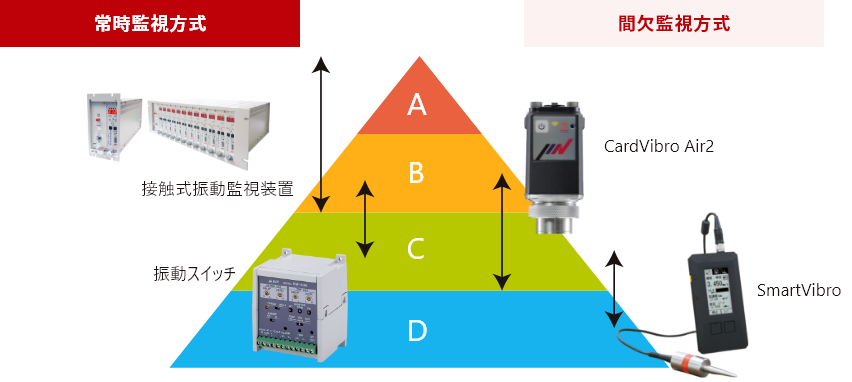
Hệ thống giám sát thường trực
-
Liên hệ Loại cảm biến Hệ thống rung Giám sát(VM-9301)
Bấm vào đây để trang sản phẩm.
-
Công tắc rung(VM-90A)
Bấm vào đây để trang sản phẩm.
Hệ thống giám sát ngoại tuyến
-
CardVibro Air2(VM-2012/VM-2012C)
Bấm vào đây để trang sản phẩm.
-
SmartVibro(VM-4424H/VM-3024H/ VM-7034H)
Bấm vào đây để trang sản phẩm.
2. Chẩn đoán đơn giản là gì?
Mục đích là để chẩn đoán cơ sở vật chất và cho thấy rõ mức độ xuống cấp bằng cách đo độ rung.Giá trị phán đoán sẽ cần thiết để đánh giá chính xác.Có ba phương pháp phán đoán chính trong chẩn đoán đơn giản.Sử dụng ba phương pháp này sẽ đảm bảo phép đo chính xác hơn.
1.Đánh giá giá trị tuyệt đối
Cơ sở vật chất được phân thành nhiều loại (loại nhỏ, loại trung bình, loại lớn).Đó là một phương pháp mà nếu độ rung đo được vượt quá một mức nhất định, nó được chẩn đoán là bất thường.
Lợi thế
Phán đoán dễ dàng vì tiêu chuẩn chẩn đoán đã được thiết lập.
Điều bất lợi
Đánh giá có thể thay đổi tùy thuộc vào loại hoặc bộ phận của cơ sở và nhà sản xuất.
Ví dụ phán đoán
Tiêu chuẩn đánh giá độ rung ISO
Tiêu chuẩn này được sử dụng rộng rãi để đánh giá tổng hợp máy quay.
Tiêu chuẩn ISO hiện hành 10816-3:2009 mô tả phán đoán giá trị tuyệt đối theo vận tốc rms
-
Bộ máy khách quan được phân thành 2 nhóm chính
-
Nhóm máy móc1máy móc lớn
Công suất: 300kW~50MW, Chiều cao trục:> 315mm
-
Nhóm máy móc2máy móc trung bình
Công suất: 15kW~300kW, Chiều cao trục: 160mm~315mm
-
-
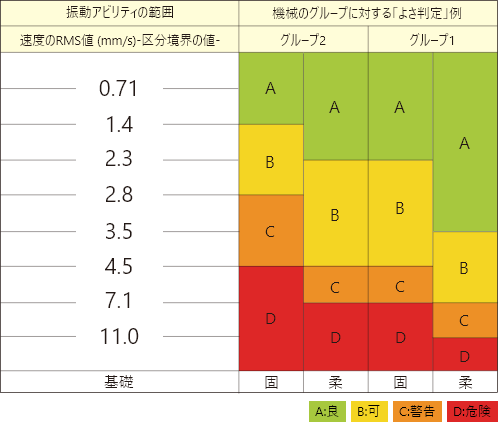
Hình: yêu cầu đối với dụng cụ đo độ rung 10816:2009.
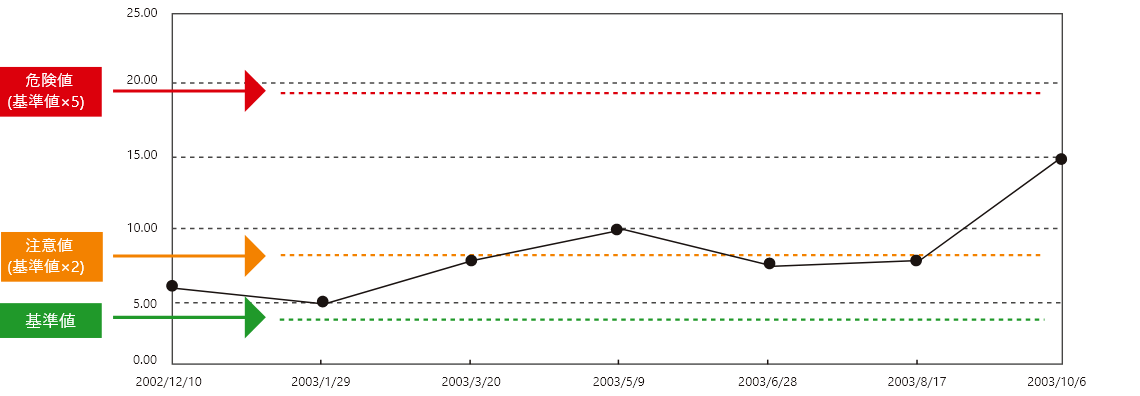
2. Đánh giá giá trị tương đối
Phương pháp thiết lập giá trị vận tốc chuẩn RMS và so sánh giá trị bình thường với một số giá trị tuyệt đối để phán đoán.Giá trị bình thường của vận tốc RMS do ai đó thiết lập ban đầu được nhân x lần để được coi là “giá trị cảnh báo” hoặc “giá trị nguy hiểm”. Ví dụ: khi giá trị RMS vận tốc của động cơ hiển thị 5,00 hầu hết sau hơn mười lần đo, “5,00” có thể được thiết lập thành giá trị bình thường. 10.00 (cao gấp hai lần giá trị bình thường) được thiết lập là giá trị cảnh báo, 25,00 (cao gấp năm lần giá trị bình thường) là “giá trị nguy hiểm”. Giá trị bình thường nên được quyết định sau hơn mười lần đo.
Lợi thế
Chính xác hơn phán đoán giá trị tuyệt đối
Điều bất lợi
Vì giá trị thông thường được quyết định theo kinh nghiệm cá nhân của mỗi người nên vẫn còn sự mơ hồ trong tính hiệu lực của các giá trị phán đoán.
Ví dụ phán đoán
Đây là trường hợp giá trị cảnh báo được đặt cao gấp hai lần giá trị bình thường. Giá trị nguy hiểm được đặt cao gấp năm lần giá trị bình thường.
Biểu đồ phân tích xu hướng V(RMS)
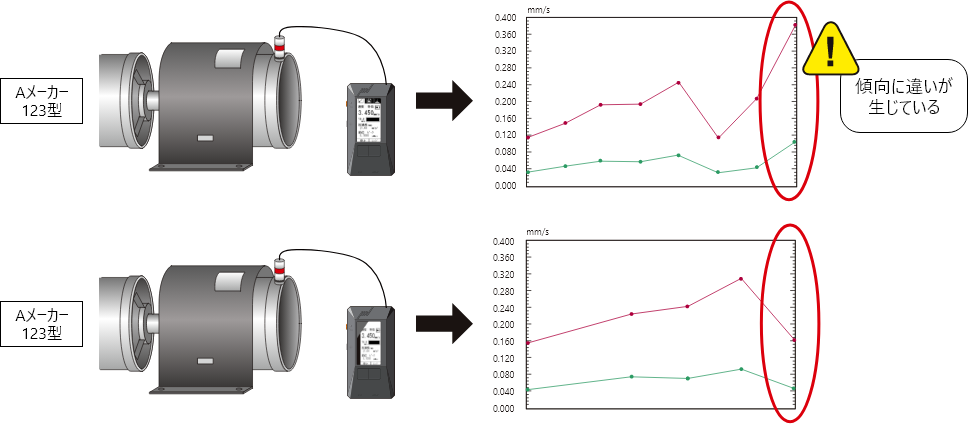
3. Đánh giá giá trị so sánh giữa các bên
Một phương pháp đánh giá bằng cách so sánh lượng rung động tại cùng một điểm đo của cùng một máy. Nếu giá trị số lớn hơn gấp đôi so với cơ sở vật chất tương đương, thì có khả năng xảy ra bất thường.
Lợi thế
Chính xác hơn phán đoán giá trị tương đối
Điều bất lợi
Máy móc áp dụng có hạn
Ví dụ phán đoán
Khi có sự khác biệt hơn hai lần giữa hai máy giống nhau, có thể có sự bất thường.
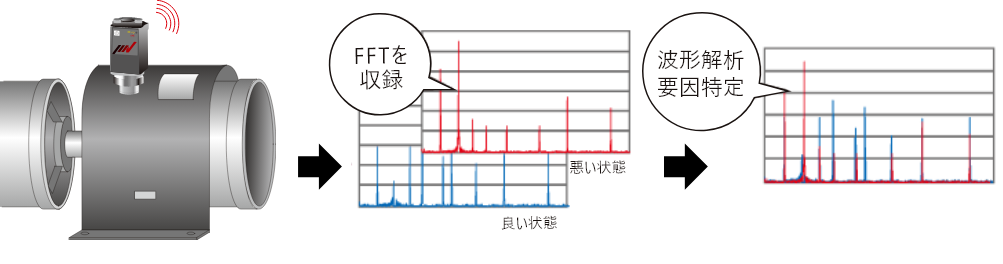
3. Chẩn đoán chính xác là gì?
Mục đích là để phân tích dạng sóng bằng FFT và xác định bộ phận máy đã xuống cấp theo phân bố tần số, tạo ra kết quả đáng tin cậy hơn so với chẩn đoán đơn giản.
Khi máy móc bình thường và máy móc bất thường được so sánh với FFT, nó có thể cho thấy sự thay đổi lớn ở giá trị tần số tính năng.
Biểu đồ sau đây là về tần suất tính năng và các loại trạng thái bất thường.
Mang bất thường và tần số tính năng
| Các loại trạng thái bất thường | Chế độ được kiểm tra | tần số tính năng | ||
|---|---|---|---|---|
| 1 | sự mất cân bằng | vận tốc | 1 × N/60 và tần số của nó (ít) | |
| 2 | sai lệch | vận tốc | M × N/60 | |
| 3 | Vòng bi trầy xước | Tổn thương vòng ngoài | Sự tăng tốc | 0.4 ×(số bóng)× N/60 và sóng hài của nó |
| tổn thương vòng trong | Sự tăng tốc | 0.6 ×(số bóng)× N/60 và sóng hài của nó | ||
| hư hỏng phần tử lăn | Sự tăng tốc | 2.5 × N/60 và sóng hài của nó | ||
| thiệt hại lồng | Sự tăng tốc | 0.4 × N/60 và sóng hài của nó | ||
| Dầu mỡ hoặc thiếu dầu | Sự tăng tốc | N/60 và sóng hài của nó | ||
| Tiến độ xuống cấp, hao mòn | Sự tăng tốc | 0.4 ×(số bóng)× N/60 và sóng hài của nó or、 0.6 ×(số bóng)× N/60 và sóng hài của nó or、 0.4 × N/60 và sóng hài của nó or、 2.5 × N/60 và sóng hài của nó |
||
| 4 | Bánh răng | Dầu mỡ hoặc thiếu dầu | vận tốc/Phong bì | PHz (tần số ném) |
| Pitching (khuyết tật bề mặt răng) | vận tốc/Phong bì | P | ||
| sứt mẻ răng (hao mòn một phần) | vận tốc/Phong bì | P±MN | ||
| sứt mẻ răng | vận tốc/Phong bì | MN | ||
| Độ lệch tâm | vận tốc/Phong bì | MN or P±MN P=Z × N/60 | ||
| 5 | trục uốn | vận tốc | 1 × N/60 và sóng hài của nó | |
| 6 | nứt trục | vận tốc | 1 × N/60 và sóng hài của nó | |
| 7 | cộng hưởng | vận tốc/gia tốc/Phong bì | Rung động của tần số tự nhiên | |
| 8 | tín hiệu điện | vận tốc | 50 or 60Hz | |
| 9 | cọ xát | Phong bì | Rung tần số cao (>1 kHz) | |
| 10 | Rung động bên ngoài | vận tốc/gia tốc/Phong bì | Tùy thuộc vào các cơ sở khác | |
N=Số vòng quay (vòng/phút), M=Số lần (1, 2, 3…), P=Tần số xoay *Bất thường được mô tả ở trên có thể được nhận biết chính xác bằng cách kiểm tra chế độ được chỉ định.